Approach
Information theory
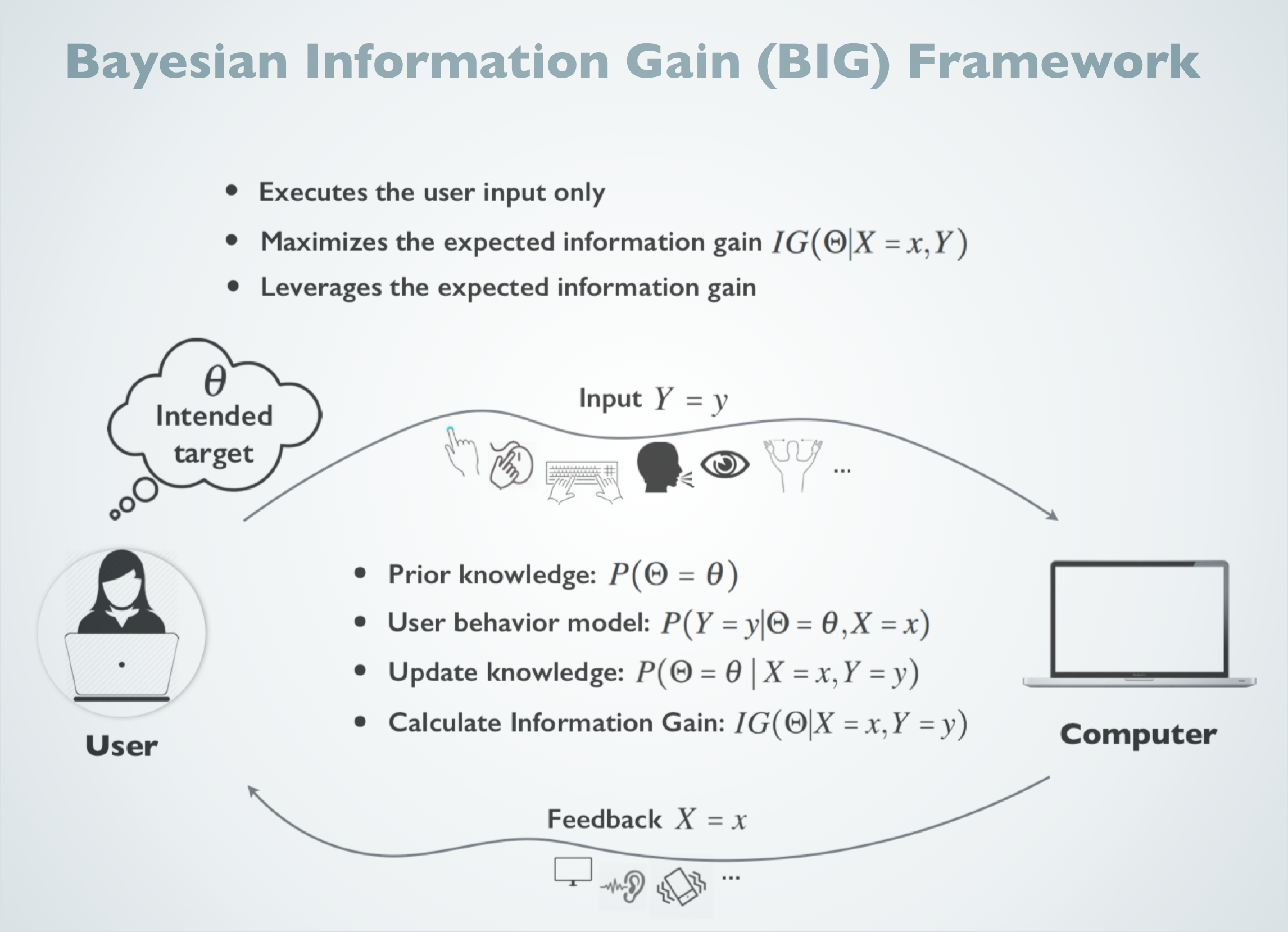
Bayesian interaction
Data
Controlled experiment
Lab study
Quantitative analysis
Period
2016-2017
BIGnav
Bayesian Information Gain for Multiscale Navigation
BIGnav is a new multiscale navigation technique based on Bayesian Experimental Design with the criterion of maximizing the information-theoretic concept of mutual information. At each navigation step, BIGnav interprets user input, updates its estimate of the user’s intention, and navigates to a view that maximizes the expected information that will be gained from the user’s subsequent input.
Results of a controlled experiment comparing BIGnav with standard pan and zoom for different levels of difficulty and different distributions of the information space show that BIGnav is up to 40% faster than the baseline for distant targets and non-uniform information spaces.
BIGnav is the first example of the framework Bayesian Information Gain (BIG) that I developped during my Ph.D. thesis.
An overview of BIGnav is here:
Publication
Wanyu Liu, Rafael Lucas D'Oliveira, Michel Beaudouin-Lafon, and Olivier Rioul. 2017. BIGnav: Bayesian Information Gain for Guiding Multiscale Navigation. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems (CHI '17). Association for Computing Machinery, New York, NY, USA, 5869–5880. DOI:https://doi.org/10.1145/3025453.3025524
Best Paper Award (Top 1%)